Лабораторна №3
Паралельні проекції
Метою разділу є ознайомлення з елементарним математичним апаратом плоских геометричних проекцій. Для простоти будемо вважати, що при центральному проектуванні картинна площина перпендикулярна осі z і збігається з площиною z = d, а при паралельному збігається з площиною z = 0. Проекції розглядаються в системі координат спостерігача, що є лівосторонньою. Система координат, в якій вісь х спрямована вправо, вісь у - вгору, а вісь z - усередину екрана, природньо погоджується з екраном дисплея.
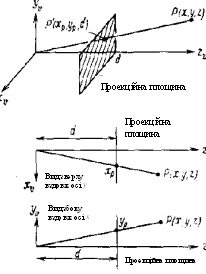
Рис.1 Центральна проекція
Кожну з проекцій можна описати матрицею розміром 4х4. Цей спосіб виявляється зручним, оскільки з'являється можливість об'єднати матрицю проектування з матрицею перетворення, представивши в результаті дві операції (перетворення і проектування) у виді однієї матриці. У цьому розділі ми одержимо матриці розміром 4х4 для декількох проекцій і насамперед для центральної. На рис.1 наведені три зображення лівосторонньої системи координат, у яких точка P проектується на проекційну площину, розташовану на відстані d від початку координат. Для обчислення координат Xр і Yp проекції точки (x, у, z) напишемо співвідношения, отримані з подібності трикутників (рис.1):
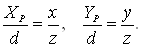
Перемножуючи обидві сторони кожного співвідношення на d, одержимо

Відстань d є в даному випадку масштабним множником, застосованим до координат Xp і Yp. Фактором, що приводить до того, що на центральній проекції більш віддалені об'єкти виглядають дрібніше, ніж ближчі, є ділення на z. Відзначимо, що допустимі всі значення z, крім z = 0. Точки можуть розташовуватися як за центром проекції на від’ємній частині осі z, так і між центром проекції і проекційною площиною.
Ці перетворення можна представити у вигляді матриці розміром 4х4:
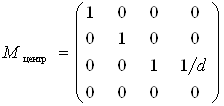
Множачи точку  на матрицю $IMAGE6$. отримаємо загальний вираз для точки в однорідних координатах $IMAGE7$:
на матрицю $IMAGE6$. отримаємо загальний вираз для точки в однорідних координатах $IMAGE7$:
$IMAGE8$
$IMAGE9$
геометричний проекція косокутний матриця
Тепер, поділивши на W (що дорівнює z/d) для зворотнього переходу до трьох вимірів, отримаємо
$IMAGE10$
Цей результат є коректним, оскільки містить перетворену z - координату з 1, що відповідає положенню проекційної ПЛОЩИНИ ВЗДОВЖ ОСІ 2.
$IMAGE11$
Рис. 2 Інша схема побудови центральної проекції
При іншому представленні центрального проектування, застосовуваному в деяких роботах, проекційна площина сполучається з площиною 2 = 0, а центр проекції розташовується в точці 2 = - с (рис. 2). З подібності трикутників випливає
$IMAGE12$
Звідси одержуємо
$IMAGE13$
Матриця записується у виді
$IMAGE14$
Цю матрицю можна одержати з матриці $IMAGE6$ шляхом переносу центра проекції в початок координат, застосування $IMAGE6$ і зворотнього переносу:
$IMAGE17$
Ортографічне проектування на площину z = 0 очевидне. Напрямок проектування збігається з нормаллю до площини проекції, тобто в нашому випадку з віссю z. Таким чином, точка Р має координати:
$IMAGE18$
Ця проекція описується матрицею
$IMAGE19$
$IMAGE20$
Рис. 3 Косокутна рівнобіжна проекція одиничного куба.
Точка Р' є проекцією точки P (0, 0, 1)
Розглянемо тепер косокутну проекцію, матриця якої може бути записана виходячи зі значень a і l (рис. 3). На рис. 3 зображений одиничний куб, спроектований на xy-площину. З малюнка видно, що проекцією точки P (0, 0, 1), що знаходиться на задній стороні' одиничного куба, є точка Р'(l соsа, l sіnа, 0), що належить площині ху. По визначенню це означає, що напрям проектування збігається з відрізком РР', що проходить через ці дві точки (рис. 4). Цей напрям є Р'-Р= (l соsа, l sina, -1). Напрям проектування складає кут р із площиною ху.
Тепер розглянемо довільну точку x, у, z і визначимо її косокутну проекцію (Хр,Ур) на площину ху. На рис. 5 показані два зображення точки і проектор, що рівнобіжний проектору, приведеному на рис.4. Рівняння для x- і y-координат проектора як функцій z мають вид у=mz+b. Вирішуючи два рівняння относительно Хр і Yр, відзначених на рис.5, одержуємо
$IMAGE21$
Матриця розміром 4х4, що виконує ці дії і, отже, описує косокутну проекцію, має вигляд
$IMAGE22$
Застосування матриці $IMAGE23$ приведе до зсуву і наступного проектування об'єкта: площини з постійною координатою z = z1 переносяться в напрямку х на z1*l соsa в напрямку y на z1*l sina і потім проектуються на площину z = 0. Зсув зберігає паралельність прямих, а також кути і відстані в площинах, паралельних осі z.
$IMAGE24$
Рис. 4. Косокутна паралельна проекція Р'(l соsа, l sinа, 0) проекцією точки P (0, 0, 1).
$IMAGE25$
Рис. 5 Косокутна паралельна проекція (Xp, Yp, 0) точки (x, y, z).
Для проекції кавальє l=1, тому кут р, показаний на рис.4.17, складає 45°. Для проекції кабіні l=1/2, а b=агtg (2) =63,4°. У випадку ортографічної проекції l = 0 і b = 90°, тому $IMAGE26$ є окремим випадком $IMAGE27$.