Курсова робота:
Система автоматичного регулювання асинхронного електродвигуна з фазним ротором
Зміст
Введення
1. Характеристика об'єкта керування, опис пристрою й роботи САР, складання її функціональної схеми. Принцип автоматичного керування й вид системи
2. Складання структурної схеми системи
3. Визначення закону регулювання системи
4. Визначення передатних функцій системи й впливах і для помилок по цих впливах
5. Аналіз стійкості системи. Визначення запасів стійкості
5.1 Аналіз стійкості за критерієм Гурвіца
5.2. Аналіз стійкості за критерієм Найквиста
5.3 Визначаємо запас стійкості САР:
6. Аналіз залежності статичної помилки системи від зміни керуючого впливу на систему
7. Спільний аналіз зміни керованої величини об'єкта керування й системи від впливу, що обурює, у статиці. Визначення статичної помилки системи по впливу, що обурює
8. Оцінка якості керування по перехідних функціях
8.1 Визначення перерегулювання
8.2 Швидкодія системи
8.3 Коливання перехідного процесу
8.4 Визначення статичної помилки системи по перехідній функції
9. Загальні виводи по роботі
Література
Введення
Ціль роботи: закріплення базових знань за курсом «Основи автоматики» на прикладі проведення аналізу системи автоматичного регулювання.
Завдання:
Дати коротку характеристику об'єкта керування, описати пристрій і роботу системи, скласти її функ
ціональну схему. Зробити вивід про принцип автоматичного керування, використаному в системі, і виді системи.
Визначення закону регулювання системи.
Визначити передатні функції системи по керуючий, що обурює впливи і для помилок по цих впливах.
Виконати аналіз стійкості системи за критеріями Гурвіца й Найквиста. Визначити запаси стійкості.
Проаналізувати залежність статичної помилки системи від зміни керуючого впливу на систему. Зробити вивід про характер цієї системи.
Провести спільний аналіз виміру керованої (регульованої) величини об'єкта керування й системи від впливу, що обурює, у статиці. Дати їхню порівняльну оцінку. Визначити статичну помилку системи по впливу, що обурює.
Оцінити якість керування по перехідних функціях.
Зробити загальні виводи по роботі.
Дані відповідно до варіанта завдання зводимо в табл. 1.
Таблиця 1. Вихідні дані.
| варіант | схема | К1 | К2 | Т1,з | Кд | Тд, з | Ку | Кдв | Кр | Кв | Кп | Тдв, з |
| 13 | 20 | 50 | 0,4 | 4 | 0,1 | 0,1 | 50 | 0,002 | 0,1 | 5 | 5 | 0,5 |

Рис. 1 - 1 САР частоти обертання приводного електродвигуна стенда для обкатування ДВС
1. Характеристика об'єкта керування, опис пристрою й роботи САР, складання її функціональної схеми. Принцип автоматичного керування й вид системи
САР частоти обертання приводного електродвигуна стенда для обкатування ДВС складається з об'єкта керування й регулятора.
Об'єктом керування (ОУ) розглянутої САР є асинхронний електродвигун з фазним ротором. Регульованою величиною є частота обертання вала двигуна ?. Метою керування є підтримка частоти обертання ? на заданому рівні шляхом зміни опору в ланцюзі ротора асинхронного електродвигуна. Керуючим впливом на ОУ є кут повороту вала, приєднаного до реостата, ?р. Основний вплив, що обурює, зміна моменту опору Мс на валу двигуна.
1. Датчиком (Д) є тахогенератор постійного струму Uд. Вхідний сигнал для тахогенератора - частота обертання вала двигуна, вихідний сигнал - напруга Uд датчика.
За датчиком системи є опір R1. сигнал - це величина напруги U3, що у певному масштабі відповідає заданому значенню частоти обертання вала ?.
2. Диференціальний підсилювач (ДУ) 2 виконує так само й функції пристрою, що порівнює (СУ), порівняння (вирахування) вхідних сигналів і посилення їхньої різниці. На вхід підсилювача надходять напруги датчика UЗ , напруга з тахогенератора UД і Uос пристрою зворотного зв'язку. Вихідний сигнал підсилювача - напруга Uу, подаване на електродвигун 3.
3. Виконавчий пристрій являє собою виконавчий механізм, що складається з електродвигуна (Дв) 3 і редуктори (Р) 4. Вхідний сигнал для електродвигуна - напруга Uу, вихідний сигнал - кут повороту ?дв вала електродвигуна. Вхідний сигнал для редуктора - ?дв, вихідний сигнал - кут повороту вала ?р редуктора.
4. Пристрій місцевого зворотного зв'язку (УОС) виконано у вигляді датчика (6). Вхідний сигнал УОС - кут повороту ?р, вихідний сигнал - напруга Uос.
5. Регулювальним органом (РО) є рідинної реостат 5 який змінює опір у роторі електродвигуна 7. Вхідний сигнал - кут повороту ?р, вихідний сигнал - опір Rф.
На підставі вищевикладеного складена функціональна схема системи, що наведена на мал.2.
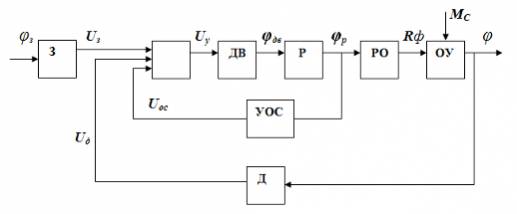
Малюнок 2 Функціональна схема САР частоти обертання приводного електродвигуна стенда для обкатування ДВС.
Система працює в такий спосіб:
У сталому режимі при рівності частоти обертання ? ротора двигуна заданої ? з , напруги Uз ,Uос ,Uд взаємно компенсуються й вихідну напругу UУ на ДУ дорівнює 0. При відхиленні частоти обертання від заданої, наприклад, через зміну моменту на валу ДВС Мс, напруга на виході датчика Uд змінюється, з'явиться різниця напруг у результаті чого на виході ДУ з'явиться напруга UУ відмінне від нуля. Напруга UУ подається на електродвигун. Двигун через редуктор змінює положення рідинного опору, тим самим, збільшуючи або зменшуючи частоту обертання вала ротора, повертаючи її до заданого значення. Одночасно вихідний вал редуктора переміщає рухливий контакт датчика місцевого зворотного зв'язку. Вихідна напруга Uос якого подається на ДУ . За рахунок місцевого зворотного зв'язку забезпечується пропорційна залежність між напругою Uд і кутом повороту вала редуктора.
У результаті розгляду пристрою й роботи системи можна зробити наступні виводи:
У системі реалізований принцип керування по відхиленню (помилці).
Система є стабілізуючою.
2. Складання структурної схеми системи
Для складання структурної схеми одержимо передатні функції всіх елементів системи.
Рівняння об'єкта керування:
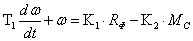
Зображення Лапласа цього рівняння:

Передатна функція по керуючому впливі:
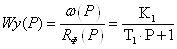 $IMAGE6$
$IMAGE6$
По впливі, що обурює:
$IMAGE7$
Датчик частоти обертання (тахогенератор):
$IMAGE8$
$IMAGE9$
3. Датчик:
$IMAGE10$
$IMAGE11$
Диференціальний підсилювач:
$IMAGE12$
$IMAGE13$
$IMAGE14$
$IMAGE15$
$IMAGE16$
$IMAGE17$
Редуктор:
$IMAGE18$
$IMAGE19$
Пристрій зворотного зв'язку:
$IMAGE20$
$IMAGE21$
Регульований рідинної реостат:
$IMAGE22$
$IMAGE23$
Структурна схема системи показана на мал. 3
$IMAGE24$
Малюнок 3 Структурна схема САР частоти обертання приводного електродвигуна стенда для обкатування ДВС.
Тому що датчик є безінерційним його коефіцієнт передачі $IMAGE25$ повинен бути таким, що дорівнює коефіцієнту передачі $IMAGE26$ датчика, оскільки задане UЗ і дійсне U напруги повинні відніматися в одному масштабі. Тому для наочності дослідження ці коефіцієнти $IMAGE27$ можна перенести за СУ й уважати, що із заданої напруги UЗ безпосередньо віднімається обмірюване датчиком і формується сигнал помилки $IMAGE28$.
3. Визначення закону регулювання системи
Визначаємо закон регулювання розглянутої САР частоти обертання приводного електродвигуна стенда для обкатування ДВС. Для цього знайдемо передатну функцію, що визначає взаємозв'язок керуючого впливу RФ на об'єкт і помилку $IMAGE28$:
$IMAGE30$
Попередньо замінимо ланки, охоплені місцевим зворотним зв'язком (УОС) з коефіцієнтом передачі Kп, одною еквівалентною ланкою.
Передатна функція ланцюга охопленим місцевим зворотним зв'язком, визначається по формулі:
$IMAGE31$ $IMAGE32$
Підставимо в знайдене вираження чисельні значення параметрів і одержимо:
$IMAGE33$
При послідовному з'єднанні ланок їхні передатні функції перемножуються, тому:
$IMAGE34$
Остаточно для безінерційного регулятора одержуємо:
$IMAGE35$
Залежність керуючого впливу RФ від помилки е показує, що в розглянутій системі застосований П - закон регулювання.
4. Визначення передатних функцій системи й впливах і для помилок по цих впливах
Передатна функція САР по керуючому впливу:
$IMAGE36$
$IMAGE37$
= $IMAGE38$
Передатна функція САР по впливі, що обурює:
$IMAGE39$ $IMAGE40$=
$IMAGE41$ $IMAGE42$
Передатна функція САР для помилки по керуючому впливі:
$IMAGE43$ $IMAGE44$
$IMAGE45$ $IMAGE46$
Передатна функція САР для помилки по впливі, що обурює:
$IMAGE47$
$IMAGE48$ $IMAGE49$
5. Аналіз стійкості системи. Визначення запасів стійкості
5.1 Аналіз стійкості за критерієм Гурвіца
Для аналізу стійкості САР частоти обертання приводного електр
